
Quadrupedal robot for hazardous environments
The Challenge Understand the trade offs in stability, payload, range, robustness, and versatility. Then optimise the form factor and the trained policy of a quadrupedal robot for a given use case.
Why it matters Quadrupedal robots operating in hazardous environments need to perform within a set of difficult constraints: long range (or operating cycle duration), various and heavy payloads, efficient movement, plus the ability to operate in variable terrain with obstacles and narrow access which restricts robot dimensions. They need to do this while being robust, with long operating lifetimes, and yet be produced at low cost.
Generative Approach

Fully Parametric Kinematic Model: Robot geometry parameterised across limb lengths, body dimensions, battery configuration, and actuation options (direct drive vs. push rod linkage).
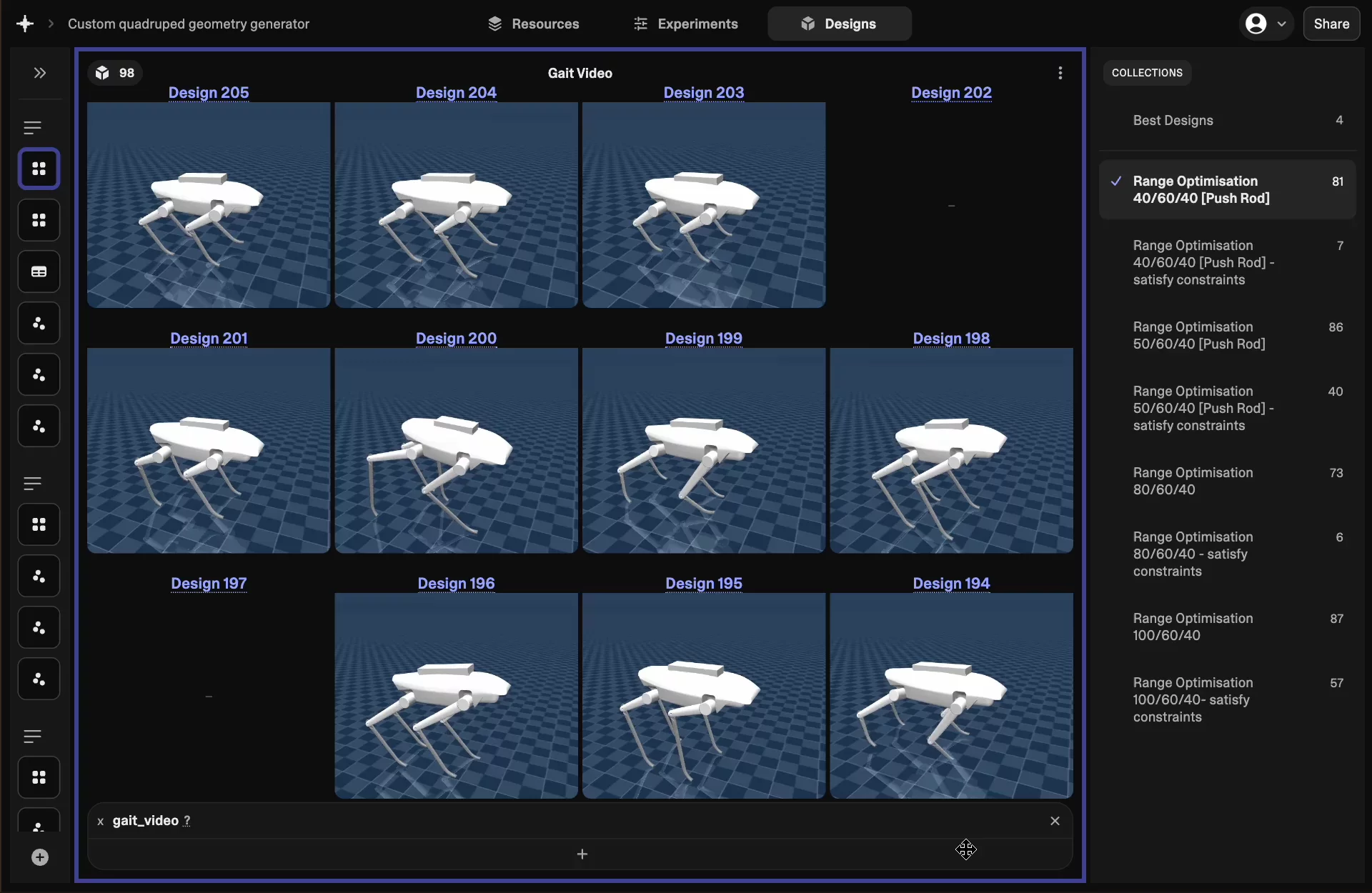
RL-Based Locomotion Training Pipeline: Reinforcement learning policy trained for each design to compute realistic gaits and inform feasibility and performance.

Energy Simulation from First Principles: Battery capacity, runtime, and range derived from simulated torque profiles and power consumption during walking.

Iterative Exploration: Sequential explorations with different mechanisms and progressively refined input bounds and constraints, each building on prior insights.

Multiple constraints & Objectives: Balance multiple constraints on torque and velocity with performance trade offs across both push rod and direct drive systems.

Generative Impact

Motor Constraint Forces Sub-Optimal Geometry: Tight calf motor limit forced designs toward short distal segments outside the optimal region, so only poor solutions could satisfy the constraint.

Identifying bottlenecks: Understanding the impact of most consequential hardware decision. Increasing calf motor capacity increased feasible designs from 8% to 66% with improvements in performance.

Push Rod Trade-Off: 50% Smaller Motor at 6% Range Cost: Introducing a push rod mechanism reduces motor torque by 50% while maintaining performance (achieving 7.5 km vs. 8.00 km with direct drive.)

Convergence to Biomechanically Consistent Proportions: Designs converged to limb ratio 1.0–1.3, matching power-focused quadrupeds. Verifying the real-world validity of the learned gait and design.
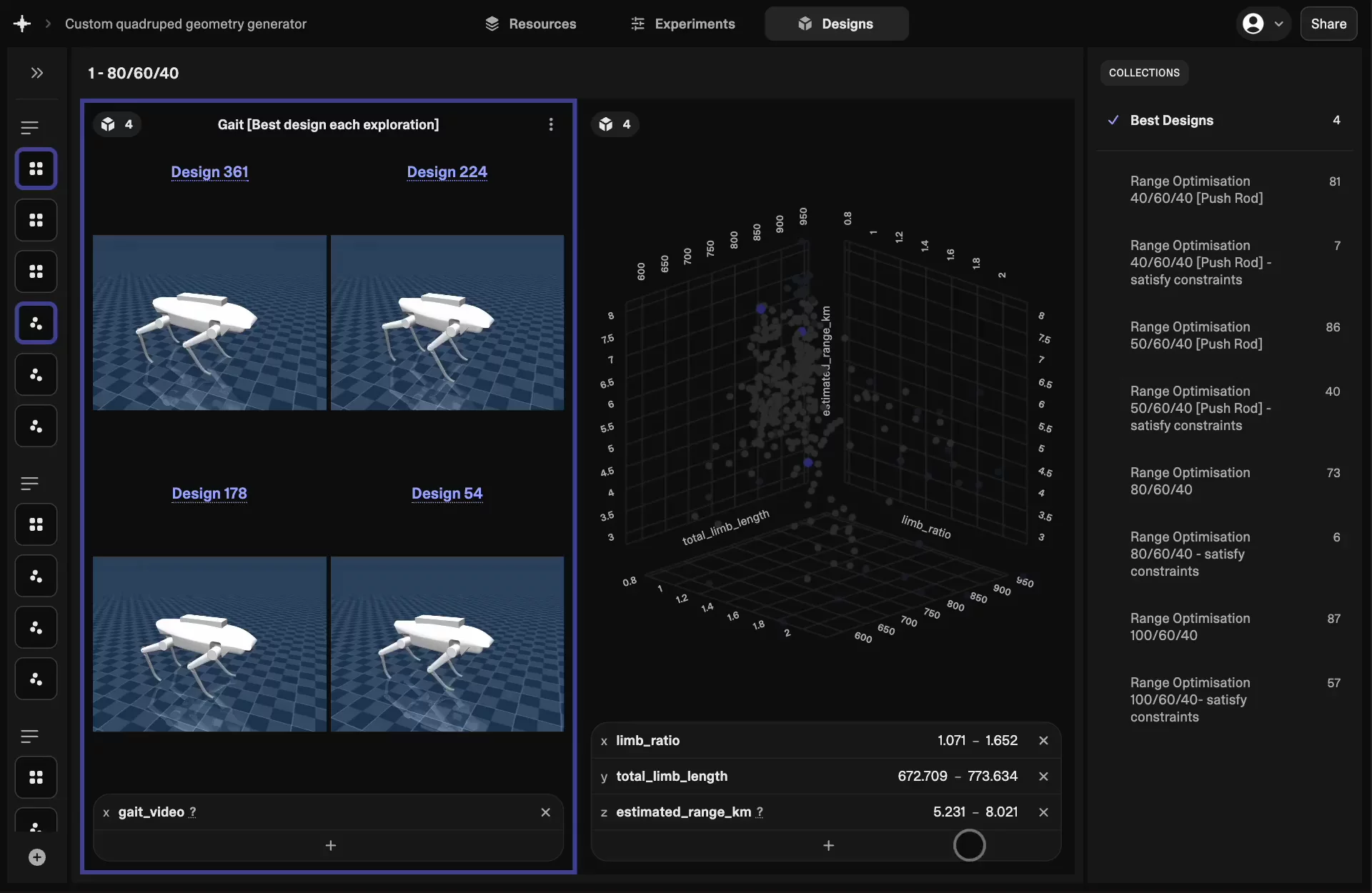
Highlight the best option for each motor selection. Quickly compare the relevant metrics for the best performing solutions for each set of motor constraints.


